
I am a final year Ph.D. student at Computer Vision Group at Tampere University, under the joint supervision of Prof. Joni Kämäräinen and Joni Pajarinen (Aalto University).
I have 6 years of interdisciplinary research and industrial experience in computer vision and robot learning/deep learning, and worked on two academic-industrial cooperation projects with Co. Nokia and Co. Cargotec (supervised by Dr.Juho Vihonen and Dr.Mohammad M. Aref).
My current research focuses on visual representation learning, model-free imitation learning, and offline model-free reinforcement learning/planning, with the goal of developing safe-AI solutions for real-world applications. My research outcomes have been published in top-tier international robot/AI conferences such as ICRA, IROS, NeurIPS, and resulted in one WO patent in the related fields (link ). In addition, I have served as a PC Member of various conferences, including BMVC, ICRA, IROS, and AAAI.
📝 Publications
Preprints
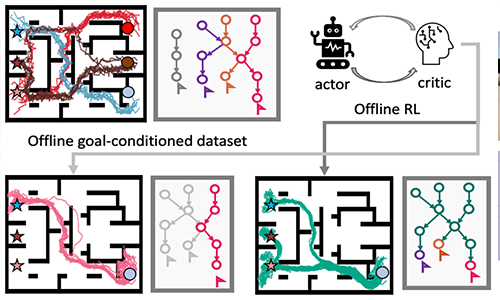
Swapped goal-conditioned offline Reinforcement Learning,
- Wenyan Yang, Huiling Wang, Dingding Cai, Joni Pajarinen, Joni-Kristen Kämäräinen
PreprintarXiv, 2023
Conferences
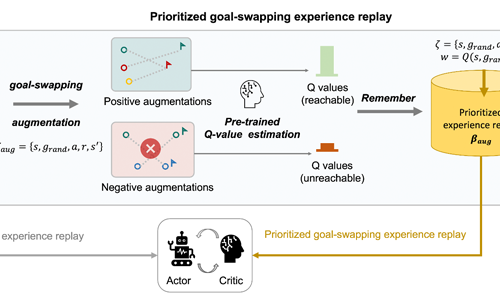
Prioritized offline Goal-swapping Experience Replay
- Wenyan Yang, Joni Pajarinen, Dinging Cai, Joni Kämäräinen
ICLR RRL workshop 2023
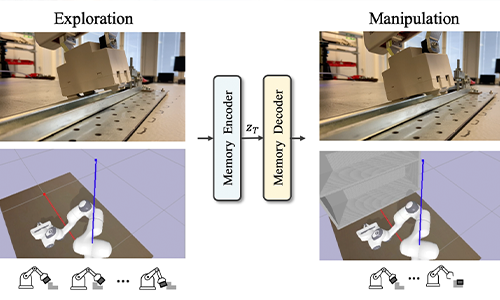
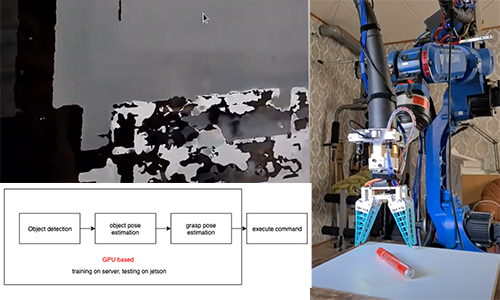
Seq2Seq Imitation Learning for Tactile Feedback-based Manipulation
- Wenyan Yang, Alexandre Angleraud, Roel S. Pieters, Joni Pajarinen, Joni-Kristian Kamarainen
ICRA 2023
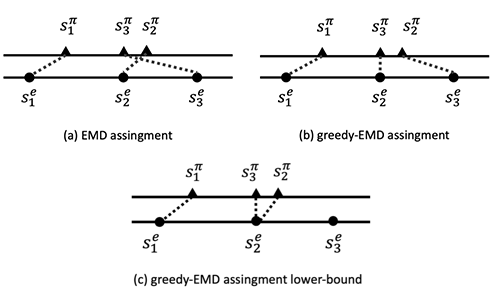
Constrained Imitation Q-learning with Earth Mover’s Distance reward
- Wenyan Yang, Nataliya Strokina, Joni Pajarinen, Joni-Kristian Kämäräinen
NeurIPS workshop 2022
Monolithic vs. hybrid controller for multi-objective Sim-to-Real learning
- Atakan Dag, Alexandre Angleraud, Wenyan Yang, Nataliya Strokina, Roel S Pieters, Minna Lanz, Joni-Kristian Kämäräinen
IROS 2022

Neural Network Controller for Autonomous Pile Loading Revised
- Wenyan Yang, Nataliya Strokina, Nikolay Serbenyuk, Joni Pajarinen, Reza Ghabcheloo, Juho Vihonen, Mohammad M Aref, Joni-Kristian Kämäräinen
ICRA 2021
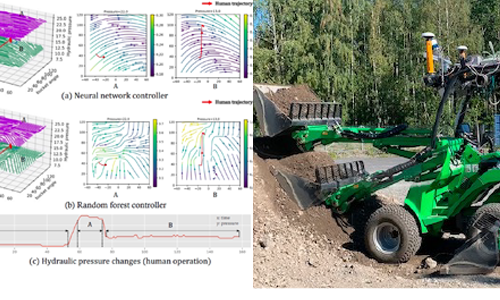
Learning a pile loading controller from demonstrations
- Wenyan Yang, Nataliya Strokina, Nikolay Serbenyuk, Reza Ghabcheloo, Joni Kämäräinen
ICRA 2020
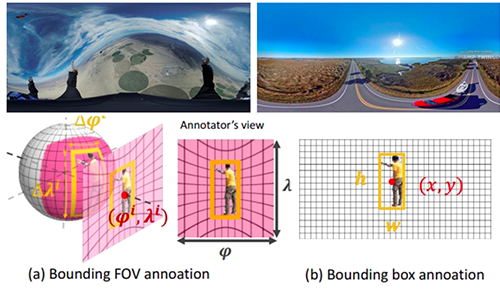
Object detection in equirectangular panorama
- Wenyan Yang, Yanlin Qian, Joni-Kristian Kämäräinen, Francesco Cricri, Lixin Fan
ICPR 2018
Journal
Frontiers in Robotics and AIVisual Rewards From Observation for Sequential Tasks: Autonomous Pile Loading, Nataliya Strokina, Wenyan Yang, Joni Pajarinen, Nikolay Serbenyuk, Joni Kämäräinen, Reza Ghabcheloo
Patent
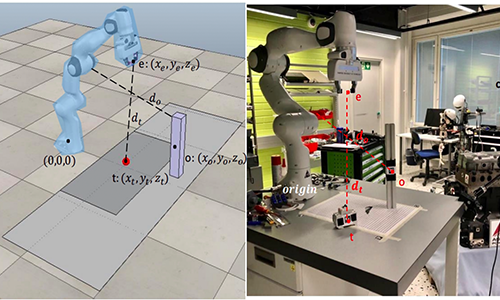
WO PatentMethod and apparatus for relative positioning of a spreader Wenyan Yang, Mohammad Aref, Juho Vihonen, Jyri Lukkala, Mikko Asikainen, Hannu Santahuhta
📚Others
ECCV VOT challenge 2022The Tenth Visual Object Tracking VOT2022 Challenge Results, Matej Kristan, Ales Leonardis, Jiri Matas, Michael Felsberg, Roman Pflugfelder, Joni-Kristian Kamarainen, Hyung Jin Chang,MartinDanelljan,LukaCˇehovinZajc,AlanLukezˇicˇ, Ondrej Drbohlav, Johanna Bjorklund, Yushan Zhang, Zhongqun Zhang, Song Yan, Wenyan Yang, Dingding Cai, Christoph Mayer, and Gustavo Fernandez.
👨💻 Projects
Industrial projects
[Autonomous Industrial Crane Controller (Co. Cargotec)]
-
2019 - 2022.12
-
DSII project with Co. Cargotec.
-
The heavy load transportation industry often involves the handling of large and weighty loads, particularly during the loading and unloading of vehicles in harbor and shipyard settings. One of the key tools used in container logistics is the spreader, which is mounted on crane systems to lift and move containers. Unfortunately, this equipment is typically operated by a human operator who requires extensive training to become proficient in using the spreader control system, making it prone to human errors.
-
We designed a reinforcement learning-based controller for industrial cranes to handle autonomous container logistics. The research outcomes with a WO patent and a deliverable solution on the real cranes.
[360 Video Object Detection Project (Co. Nokia)]
-
2017 - 2018
-
In this research work, we deliver a solution of object detection in 360° videos for the NOKIA OZO camera. The project aims at implementing object detection features on the OZO camera to enable its use in real-world applications, such as detecting if construction workers are following safety instructions.
-
The research outcomes with a novel panoramic object detection dataset and a YOLO-based 360° image object detection baseline (link).
Other projects
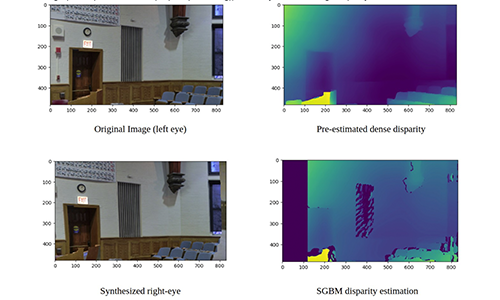
[Depth Image Data augmentation]
- Generating SGM calculated disparity estimation from monocular RGB image. This project provides a python based library which generates stereo disparity map from a single image input. This project can be used as data augmentation for generating real depth camera like depth images. (link)
🎖 Experiences
Technical skills
-Programming: Proficient in Python and past experience with C, C++, Java, MATLAB and other languages.
-Tools: Proficient in PyTorch, Numpy, OpenCV, Git, Bash, etc. Experience with TensorFlow, ROS, JAX, etc.